|
表格线识别通用库文档
|
|
表格线识别通用库文档
|
图像边缘检测预处理动作 更多...
#include <image_preprocess.hpp>
Public 成员函数 | |
| EdgeDetection (const SobelEdgeDection &_, int ddepth=-1, int dx=1, int dy=1, int ksize=3, double scale=1, double delta=0, int type=cv::BORDER_DEFAULT) | |
| 边缘检测动作的构造函数 | |
| EdgeDetection (const ScharrEdgeDection &_, int ddepth=-1, int dx=0, int dy=1, double scale=1, double delta=0, int type=cv::BORDER_DEFAULT) | |
| 边缘检测动作的构造函数 | |
| EdgeDetection (const LaplacianEdgeDection &_, int ddepth=-1, int ksize=1, double scale=1, double delta=0, int type=cv::BORDER_DEFAULT) | |
| 边缘检测动作的构造函数 | |
| EdgeDetection (const CannyEdgeDection &_, double threshold1=100, double threshold2=200, int aperture_size=3, bool l2_gradient=false) | |
| 边缘检测动作的构造函数 | |
| EdgeDetection (const RobertsEdgeDection &_, int ddepth=-1, cv::Mat kernel=(cv::Mat_< float >(2, 2)<< 1, 0, 0, -1), cv::Point anchor=cv::Point(-1, -1), double delta=0, int type=cv::BORDER_DEFAULT) | |
| 边缘检测动作的构造函数 | |
| EdgeDetection (const PrewittEdgeDection &_, int ddepth=-1, cv::Mat kernel=(cv::Mat_< float >(3, 3)<< -1, 0, 1, -1, 0, 1, -1, 0, 1), cv::Point anchor=cv::Point(-1, -1), double delta=0, int type=cv::BORDER_DEFAULT) | |
| 边缘检测动作的构造函数 | |
| EdgeDetection (const DoGEdgeDection &_, int ddepth=-1, cv::Mat kernel=(cv::Mat_< float >(5, 5)<< 0, 0, 1, 0, 0, 0, 1, 2, 1, 0, 1, 2, -16, 2, 1, 0, 1, 2, 1, 0, 0, 0, 1, 0, 0), cv::Point anchor=cv::Point(-1, -1), double delta=0, int type=cv::BORDER_DEFAULT) | |
| 边缘检测动作的构造函数 | |
| EdgeDetection (const EdgeDetection &edge_detection)=default | |
| 边缘检测类默认构造函数 | |
| ~EdgeDetection ()=default | |
| 边缘检测类析构函数 | |
| cv::Mat | Preprocess (const cv::Mat &image) const override |
| 预处理图像 | |
 Public 成员函数 继承自 cm::ImagePreprocessor Public 成员函数 继承自 cm::ImagePreprocessor | |
| ImagePreprocessor ()=default | |
| 图像预处理器类的默认构造函数 | |
| ImagePreprocessor (const ImagePreprocessor &img_preprocessor)=default | |
| 图像预处理器类的拷贝构造函数 | |
| virtual | ~ImagePreprocessor ()=default |
| 图像预处理器类的析构函数 | |
| ImagePreprocessor | operator| (const ImagePreprocessor &img_preprocessor) const |
| 图像预处理器类重载 | 运算符 | |
| ImagePreprocessor & | operator|= (const ImagePreprocessor &img_preprocessor) |
| 图像预处理器类重载 |= 运算符 | |
| ImagePreprocessor & | AddAction (const ImagePreprocessor &img_preprocessor) |
| 增加图像预处理动作 | |
| cv::Mat | operator() (const cv::Mat &image) const |
| 图像预处理器类重载括号运算符 | |
静态 Public 属性 | |
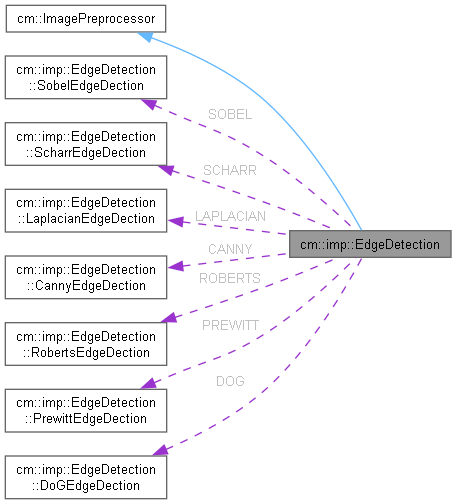
| static const struct cm::imp::EdgeDetection::SobelEdgeDection | SOBEL |
| Sobel 算子 | |
| static const struct cm::imp::EdgeDetection::ScharrEdgeDection | SCHARR |
| Scharr 算子 | |
| static const struct cm::imp::EdgeDetection::LaplacianEdgeDection | LAPLACIAN |
| Laplacian 算子 | |
| static const struct cm::imp::EdgeDetection::CannyEdgeDection | CANNY |
| Canny 算子 | |
| static const struct cm::imp::EdgeDetection::RobertsEdgeDection | ROBERTS |
| Roberts 算子 | |
| static const struct cm::imp::EdgeDetection::PrewittEdgeDection | PREWITT |
| Prewitt 算子 | |
| static const struct cm::imp::EdgeDetection::DoGEdgeDection | DOG |
| DoG 算子 | |
图像边缘检测预处理动作
该类共有继承 ImagePreprocessor ,用于对图像进行各种边缘检测。
在文件 image_preprocess.hpp 第 335 行定义.
|
inlineexplicit |
边缘检测动作的构造函数
该函数用于基于 Sobel 算子计算图像的边缘,并根据提供的参数进行设置。可以指定输出图像的深度、导数阶数、卷积核大小、缩放因子等参数,进而调整边缘检测的效果。
| _ | 使用 Sobel 算子计算边缘 |
| ddepth | 输出图像的深度,取值范围为CV_8U、CV_16U、CV_16S、CV_32F或CV_64F。如果该值为-1,则输出图像的深度与输入图像的深度相同, 默认值为 -1 |
| dx | x方向上的导数阶数,取值为0、1或2, 默认值为 1 |
| dy | y方向上的导数阶数,取值为0、1或2, 默认值为 1 |
| ksize | Sobel 算子的卷积核大小,必须是1、3、5、7等奇数, 默认值为 3 |
| scale | 缩放因子,可以用来调整输出图像中像素值的幅度, 默认值为 1 |
| delta | 偏移量,可以用来调整输出图像中像素值的基准线, 默认值为 0 |
| type | 边界处理方式,可以指定如何处理输入图像的边界, 默认值为 cv::BORDER_DEFAULT |
在文件 image_preprocess.hpp 第 401 行定义.
|
inlineexplicit |
边缘检测动作的构造函数
该函数用于基于 Scharr 算子获取图像的边缘,并根据提供的参数进行设置。可以指定输出图像的深度、导数阶数、缩放因子等参数,进而调整边缘检测的效果。
| _ | 使用 Scharr 算子来获取图像边缘 |
| ddepth | 输出图像的深度,取值范围为CV_8U、CV_16U、CV_16S、CV_32F或CV_64F。如果该值为-1,则输出图像的深度与输入图像的深度相同, 默认值为 -1 |
| dx | x方向上的导数阶数,取值为0或1, 默认值为 1 |
| dy | y方向上的导数阶数,取值为0或1, 默认值为 1 |
| scale | 缩放因子,可以用来调整输出图像中像素值的幅度, 默认值为 1 |
| delta | 偏移量,可以用来调整输出图像中像素值的基准线, 默认值为 0 |
| type | 边界处理方式,可以指定如何处理输入图像的边界, 默认值为 cv::BORDER_DEFAULT |
在文件 image_preprocess.hpp 第 420 行定义.
|
inlineexplicit |
边缘检测动作的构造函数
该函数用于利用 Laplacian 算子计算图像的边缘,并根据提供的参数进行设置。可以指定输出图像的深度、卷积核大小、缩放因子等参数,从而调整边缘检测的效果。
| _ | 使用 Laplacian 算子计算图像边缘 |
| ddepth | 输出图像的深度,取值范围为CV_8U、CV_16U、CV_16S、CV_32F或CV_64F。如果该值为-1,则输出图像的深度与输入图像的深度相同, 默认值为 -1 |
| ksize | Laplacian 算子的卷积核大小,必须是1、3、5等奇数, 默认值为 1 |
| scale | 缩放因子,可以用来调整输出图像中像素值的幅度, 默认值为 1 |
| delta | 偏移量,可以用来调整输出图像中像素值的基准线, 默认值为 0 |
| type | 边界处理方式,可以指定如何处理输入图像的边界, 默认值为 cv::BORDER_DEFAULT |
在文件 image_preprocess.hpp 第 438 行定义.
|
inlineexplicit |
边缘检测动作的构造函数
该函数用于利用 Canny 算子获取图像的边缘,并根据提供的参数进行设置。可以指定阈值、Sobel算子的孔径大小、梯度计算方式等参数,从而调整边缘检测的效果。
| _ | 使用 Canny 算子获取图像边缘 |
| threshold1 | 第一个阈值,用于控制边缘的强度 默认值为 100 |
| threshold2 | 第二个阈值,用于控制边缘的弱度 默认值为 200 |
| aperture_size | Sobel算子的孔径大小,用于求取图像的梯度, 默认值为 3 |
| l2_gradient | 布尔值,表示是否使用L2范数进行梯度计算。如果设置为true,则使用L2范数;如果设置为false,则使用L1范数, 默认值为 false |
在文件 image_preprocess.hpp 第 455 行定义.
|
inlineexplicit |
边缘检测动作的构造函数
该函数用于利用 Roberts 算子获取图像的边缘,并根据提供的参数进行设置。可以指定输出图像的深度、卷积核、锚点位置、偏移量、边界处理方式等参数,从而调整边缘检测的效果。
| _ | 使用 Roberts 算子获取图像边缘 |
| ddepth | 输出图像的深度,取值范围为CV_8U、CV_16U、CV_16S、CV_32F或CV_64F。如果该值为-1,则输出图像的深度与输入图像的深度相同, 默认值为 -1 |
| kernel | 卷积核,用于指定滤波器的权重, 默认值为 |
| anchor | 锚点位置,用于指定卷积核的中心位置,表示卷积核的中心位置 默认值为 (-1,-1) |
| delta | 偏移量,可以用来调整输出图像中像素值的基准线, 默认值为 0 |
| type | 边界处理方式,可以指定如何处理输入图像的边界, 默认值为 cv::BORDER_DEFAULT |
在文件 image_preprocess.hpp 第 475 行定义.
|
inlineexplicit |
边缘检测动作的构造函数
该函数用于利用 Prewitt 算子获取图像的边缘,并根据提供的参数进行设置。可以指定输出图像的深度、卷积核、锚点位置、偏移量、边界处理方式等参数,从而调整边缘检测的效果。
| _ | 使用 Prewitt 算子获取图像边缘 |
| ddepth | 输出图像的深度,取值范围为CV_8U、CV_16U、CV_16S、CV_32F或CV_64F。如果该值为-1,则输出图像的深度与输入图像的深度相同, 默认值为 -1 |
| kernel | 卷积核,用于指定滤波器的权重, 默认值为 |
| anchor | 锚点位置,用于指定卷积核的中心位置,表示卷积核的中心位置 默认值为 (-1,-1) |
| delta | 偏移量,可以用来调整输出图像中像素值的基准线, 默认值为 0 |
| type | 边界处理方式,可以指定如何处理输入图像的边界, 默认值为 cv::BORDER_DEFAULT |
在文件 image_preprocess.hpp 第 496 行定义.
|
inlineexplicit |
边缘检测动作的构造函数
该函数用于利用 DoG(Difference of Gaussians)算子获取图像的边缘,并根据提供的参数进行设置。可以指定输出图像的深度、卷积核、锚点位置、偏移量、边界处理方式等参数,从而调整边缘检测的效果。
| _ | 使用 DoG 算子获取图像边缘 |
| ddepth | 输出图像的深度,取值范围为CV_8U、CV_16U、CV_16S、CV_32F或CV_64F。如果该值为-1,则输出图像的深度与输入图像的深度相同, 默认值为 -1 |
| kernel | 卷积核,用于指定滤波器的权重, 默认值为 |
| anchor | 锚点位置,用于指定卷积核的中心位置,表示卷积核的中心位置 默认值为 (-1,-1) |
| delta | 偏移量,可以用来调整输出图像中像素值的基准线, 默认值为 0 |
| type | 边界处理方式,可以指定如何处理输入图像的边界, 默认值为 cv::BORDER_DEFAULT |
在文件 image_preprocess.hpp 第 519 行定义.
|
default |
边缘检测类默认构造函数
|
default |
边缘检测类析构函数
|
inlineoverridevirtual |
预处理图像
此函数根据指定的边缘检测类型对输入图像进行预处理。处理后的图像更易于进行边缘检测或其他相关操作。
| image | 需要预处理的图像 |
在文件 image_preprocess.hpp 第 541 行定义.
|
static |
Canny 算子
在文件 image_preprocess.hpp 第 576 行定义.
|
static |
DoG 算子
在文件 image_preprocess.hpp 第 582 行定义.
|
static |
Laplacian 算子
在文件 image_preprocess.hpp 第 574 行定义.
|
static |
Prewitt 算子
在文件 image_preprocess.hpp 第 580 行定义.
|
static |
Roberts 算子
在文件 image_preprocess.hpp 第 578 行定义.
|
static |
Scharr 算子
在文件 image_preprocess.hpp 第 572 行定义.
|
static |
Sobel 算子
在文件 image_preprocess.hpp 第 570 行定义.